
|
|||
|---|---|---|---|
|
|
Perspectiva analítica vectorial de las palancas anatómicas en el gesto articular |
|
|
|
*Médico y cirujano. Licenciado en Matemáticas. Especialista en Gerencia en Servicios de Salud. Mg. en Ciencias de la Actividad Física y el Deporte Docente de tiempo completo del Politécnico Colombiano Jaime Isaza Cadavid **Especialista. Mg y Doctor en Ciencias del Deporte Docentes de tiempo completo del Politécnico Colombiano Jaime Isaza Cadavid ***Fisioterapeuta. Especialista en Pedagogía Universitaria Mg. en Ciencias de la Actividad Física y el Deporte ***Docente Universidad de Pamplona, Director Programa de Fisioterapia |
Juan Cancio Arcila Arango* Donaldo Cardona Nieto** Henry Alfonso Becerra Riaño*** (Colombia) |
|
|
|
Resumen En este artículo se parte de la definición de máquinas simples para abordar primero los conceptos físicos generales de las palancas, y luego la interpretación vectorial específica de las palancas anatómicas involucradas en los movimientos del cuerpo humano. Se muestra una perspectiva analítica de los diferentes componentes morfológicos anatómicos y se establece una relación con sus equivalentes físicos biomecánicos conectados conceptualmente por la Fisiología articular. Se presenta una pauta lógica de secuencias para facilitar la discusión del gesto articular, la identificación de los fulcros y de los puntos críticos de aplicación de las fuerzas que permite caracterizar los géneros de palanca, así como los factores que, dependiendo de la actitud postural asumida por los segmentos corporales implicados, condicionan en una misma articulación la utilización de diferentes tipos de palancas. Finalmente, se hace una discusión aplicada utilizando ejemplos sencillos de palancas en diferentes articulaciones. Palabras clave: Palancas anatómicas. Gesto articular. Perspectiva analítica.
Abstract This article is part of the definition of simple machines to address first the general physical concepts of levers, then the vector interpretation specific anatomical levers involved in human body movements. It shows an analytical perspective of different anatomical and morphological components establishes a relationship with their physical counterparts biomechanical Physiology conceptually connected by joints. It presents a logical pattern of sequences to facilitate discussion of the articular gesture, identification of the fulcrums and critical points of application of the forces to characterize lever genres as well as the factors that, depending on the attitude assumed postural by the body segments involved in the same joint condition using different types of levers. Finally, a discussion is applied using simple examples of levers in different joints. Keywords: Anatomical levers. Articular gesture. Analytic perspective.
|
|||
|
|
EFDeportes.com, Revista Digital. Buenos Aires - Año 18 - Nº 182 - Julio de 2013. http://www.efdeportes.com/ |
|
|
1 / 1
Introducción
Una máquina es un dispositivo conformado por varios elementos, unos móviles y otros fijos, los cuales actúan conjuntamente para utilizar energía o realizar un trabajo. “El principio fundamental de todas las máquinas es que la cantidad de trabajo obtenido no puede ser mayor que la energía que se les suministra” (MacDonald/Burns, 1989). Una máquina puede cambiar el módulo (valor numérico), la dirección o el método de aplicación de una fuerza para obtener algún provecho (Bueche, 1991). Una máquina en la que la energía es suministrada por una sola fuerza, de manera que realiza trabajo venciendo una sola resistencia, se denomina máquina simple. Muchos dispositivos que observamos en la vida cotidiana, tales como la palanca, el plano inclinado, la polea, la manivela y el gato, son máquinas simples. “Probablemente, ningún dispositivo mecánico es tan antiguo como la palanca; sencilla y versátil, no hay duda de que es más antigua que nosotros, los humanos” (Vogel, 2000).
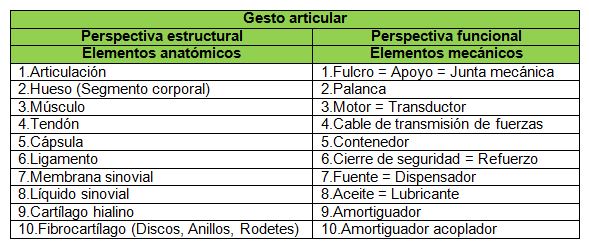
Los movimientos humanos, desde los más simples hasta los más complejos, pueden interpretarse como el resultado de la confrontación de las fuerzas internas corporales con las fuerzas externas del medio ambiente. Un conjunto de elementos anatómicos (Tabla Nº 1) provisto de una sofisticación estructural, permite realizar una visión analógica que trasciende hacia la perspectiva funcional, fisiológica, que caracteriza los eventos biomecánicos del gesto articular. Las articulaciones, entendidas como el sitio de unión de dos o más huesos (Calais-Germain, 2010), “son los engranajes que mantienen unidos entre sí a los elementos óseos, permitiéndoles llevar a cabo los movimientos para los cuales están dispuestos” (Fucci y cols., 1998). Las articulaciones son, entonces, los fulcros o apoyos de las máquinas anatómicas del cuerpo humano. Los huesos maduros son estructuras relativamente rígidas, son los elementos constitutivos de los segmentos corporales que son objeto del desplazamiento, las palancas que esperan ser movilizadas. La máquina molecular que cumple con tal propósito es el músculo, un dispositivo que convierte la energía química orgánica proveniente de los alimentos (Enoka, 2002), en energía mecánica de tipo cinético para la contracción muscular. Así, el músculo actúa como un transductor y, en consecuencia, es el motor que genera el movimiento articular. Los tendones son estructuras encargadas de trasmitir directa o indirectamente la tracción muscular a los huesos en los que se insertan (Guillen y cols., 2002), comportándose así, como cables de transmisión de fuerzas. Los tendones, junto con las cápsulas y los ligamentos, son estructuras pasivas que actúan como estabilizadores articulares secundarios. Específicamente, la cápsula está formada por tejido conectivo denso que rodea los extremos articulares de los huesos que intervienen en la articulación, incluyendo los elementos intra-articulares sobre los cuales ejerce una labor mecánica de protección y contención, con delimitación espacial de su contenido. Los ligamentos al conectar segmentos óseos contiguos guiando el movimiento y evitando desplazamientos excesivos, actúan como refuerzos estabilizadores o cierres de seguridad de la articulación. Revistiendo internamente la articulación se proyecta desde la cápsula una estructura provista de vellosidades llamada membrana sinovial, la cual actúa como fuente encargada de proveer el líquido sinovial necesario para la nutrición del cartílago y lubricación de la articulación. El cartílago hialino que recubre las superficies articulares de los huesos en contacto y el cartílago fibroso presente en los discos intra-articulares, actúan como amortiguadores que redistribuyen las cargas y generan compensaciones hidro-mecánicas, con el fin de prevenir lesiones articulares y atenuar los procesos degenerativos como la artrosis.
Tabla Nº 1. Componentes anatómicos y equivalentes mecánicos para el gesto articular
Desarrollo
Elementos de una palanca anatómica
Una palanca está compuesta por tres elementos:
1. Una barra rígida sobre la que actúan las fuerzas, la que anatómicamente en el cuerpo humano corresponde a un hueso o segmento anatómico que se quiere movilizar. El peso de esta barra más el peso del objeto que se quiere movilizar constituye la carga a vencer (o levantar) llamada Resistencia (R), la cual se aplica en el centro de gravedad o baricentro de barra más objeto (carga total) y, se dirige verticalmente hacia el centro de la tierra. Para los segmentos anatómicos el baricentro del segmento anatómico más objeto, se calcula de acuerdo con parámetros inerciales. De estos los más frecuentemente utilizados son los de localización del Cg de los segmentos corporales de Clauser y col. en1969, los ajustes de estos realizados por Hinrichs en 1990 y los de Leva en 1996, referenciados por Gutiérrez (1999).
A veces es difícil identificar la resistencia, teniendo en cuenta que a ella contribuyen los músculos antagonistas y las fascias que se oponen al progreso del gesto en una determinada dirección.
2. Un punto respecto al cual gira la barra rígida, el cual anatómicamente en el cuerpo humano está ubicado en la articulación. Este punto llamado “fulcro” o Apoyo (A), es el centro de rotación respecto al cual se realiza el gesto articular que mueve el segmento anatómico. Es importante tener en cuenta que dependiendo de la posición de la articulación en la ejecución del gesto, ocurren variaciones en la localización del centro de rotación y, por tanto, se trabaja con la “centroda” o centro de rotación instantáneo.
3. Una fuerza aplicada sobre la barra rígida, la que en el cuerpo humano es realizada por el músculo agonista en un gesto articular. Esta fuerza es llamada Potencia (P) y se aplica en algún punto de la barra. En las palancas anatómicas corresponde a la fuerza muscular aplicada en el punto de inserción donde se conecta el tendón al hueso. La fuerza muscular se representa gráficamente por un vector cuyo origen es el punto de inserción y su dirección es el ángulo de tensión muscular. Este último corresponde a la relación espacial que hay entre el eje mecánico del hueso (o segmento anatómico) y la línea de acción muscular, la cual pasa por el punto de inserción y sigue la dirección del tendón. Adicionalmente, el eje mecánico que representa el segmento óseo, es una línea recta imaginaria que pasa por los centros de las superficies articulares ubicadas en los extremos, e incluye su centro de gravedad (Vandervael, 1961).

Figura Nº 1. Elementos de una palanca anatómica en un gesto activo
En el análisis de palancas es determinante la diferenciación de algunos parámetros mecánicos, a saber:
Brazos de palanca
Son las distancias medidas entre el fulcro donde está ubicado el eje de rotación de la palanca y los puntos de aplicación de las fuerzas (Donskoi, 1982).
Brazos de fuerza
Son las distancias medidas entre el fulcro donde está ubicado el eje de rotación de la palanca y las líneas de acción de las fuerzas (Donskoi, 1982). Así, estas son distancias perpendiculares.
No obstante, hay diversidad de definiciones de varios autores con respecto a estos términos. Como lo expresan Luttgens y Wells (1982), verdaderamente, un brazo de palanca es un brazo de momento, de tal forma que la distancia perpendicular entre el fulcro y la línea de fuerza del esfuerzo (o potencia) es, el brazo de esfuerzo del momento o brazo de esfuerzo y, de manera similar, la distancia perpendicular entre el fulcro y la línea de fuerza de resistencia es el brazo de resistencia del momento o brazo de resistencia. Estos son llamados por Gowitzke y Milner (1999) respectivamente brazo perpendicular de potencia o brazo de impulso de la potencia y brazo perpendicular de resistencia o brazo de impulso de la resistencia.
Vogel (2003), Gutiérrez (1999), Aguado (1993), Grosser et al. (1991), Rasch y Burke (1986), coinciden con las definiciones de Luttgens y Wells (1982).
Fucci y cols. (1998) y Guillén y Linares (2002) por el contrario, consideran como brazo de potencia, la distancia que hay entre el punto de apoyo y el punto de aplicación de la potencia; así, en las palancas anatómicas es la distancia entre la articulación y el punto de aplicación de la fuerza muscular. De manera similar, consideran como brazo de resistencia la distancia que hay entre el punto de apoyo y el punto de aplicación de la resistencia; así, en las palancas anatómicas es la distancia entre la articulación y el baricentro del segmento.
En estas circunstancias, el torque de la fuerza muscular respecto a la articulación, puede calcularse multiplicando el brazo de potencia por el componente perpendicular de la fuerza muscular en el sistema de coordenadas convenido y teniendo presente el signo correspondiente. Análogamente, el torque del peso del segmento respecto a la articulación, puede calcularse multiplicando el brazo de resistencia por el componente perpendicular del peso del segmento en el sistema de coordenadas convenido y teniendo presente el signo correspondiente. En este trabajo se asumen las siguientes definiciones para los brazos de fuerzas:
-
Brazo de potencia (BP): Es la distancia perpendicular que hay entre el punto de apoyo y la línea de acción de la potencia. Así, en las palancas anatómicas es la distancia entre la articulación y la línea de acción de la fuerza muscular. El torque de la fuerza muscular respecto a la articulación, puede calcularse multiplicando el brazo de potencia por la fuerza muscular teniendo presente el signo correspondiente.
-
Brazo de resistencia (BR): Es la distancia perpendicular que hay entre el punto de apoyo y la línea de acción de la resistencia. Así, en las palancas anatómicas es la distancia entre la articulación y la línea de acción de la resistencia. El torque del peso del segmento respecto a la articulación, puede calcularse multiplicando el brazo de resistencia por el peso del segmento teniendo presente el signo correspondiente.
Teniendo en cuenta tales definiciones, resulta claro que la fuerza muscular no
actúa, en general sobre las palancas óseas, en sentido perpendicular a los
ejes mecánicos de los segmentos corporales y, en consecuencia, de acuerdo a los
planteamientos de Hochmuth (1973), en tales casos el brazo de potencia es
siempre inferior a la distancia entre el punto de apoyo y el punto de
aplicación de la fuerza muscular. Basados en el hecho de que la función
trigonométrica del seno de un ángulo (figura Nº 2) puede tomar valores entre
0 y 1, situación que se expresa por medio de la relación de orden ![]() entonces ocurre que
entonces ocurre que ![]() lo que significa matemáticamente que la distancia perpendicular (BP o BR) es
menor o igual que la distancia entre los puntos de apoyo y de aplicación de
fuerza (P o R). En este sentido, la acción muscular sobre la palanca ósea
resulta más eficaz para valores angulares cercanos a los 90º (Hainaut, 1976).
Como la fuerza muscular varía de forma directamente proporcional al seno del
ángulo de inserción, el brazo de potencia es máximo cuando dicho ángulo vale
90º.
lo que significa matemáticamente que la distancia perpendicular (BP o BR) es
menor o igual que la distancia entre los puntos de apoyo y de aplicación de
fuerza (P o R). En este sentido, la acción muscular sobre la palanca ósea
resulta más eficaz para valores angulares cercanos a los 90º (Hainaut, 1976).
Como la fuerza muscular varía de forma directamente proporcional al seno del
ángulo de inserción, el brazo de potencia es máximo cuando dicho ángulo vale
90º.
Los torques que se han mencionado son los que Vogel (2003) llama momentos de fuerza. Así, el torque de la potencia con respecto a la articulación es el momento de potencia y, el torque de la resistencia con respecto a la articulación, es el momento de resistencia.
“El torque o efecto rotatorio de una fuerza se representa por la letra griega
y se define matemáticamente como el producto de la fuerza por la distancia perpendicular entre la línea de acción de dicha fuerza y el punto que representa el centro de rotación. También puede definirse como el producto del componente de la fuerza que es perpendicular al eje mecánico de la palanca y la distancia entre el punto de aplicación de dicha fuerza y el punto que representa el centro de rotación. El torque es un vector perpendicular al plano formado por la fuerza F y la distancia d (Marion and Hornyak, 1982) cuyo signo obedece a la regla de la mano derecha o, simplemente, asumiendo como positivo el sentido anti-horario en el que el vector busca el centro de rotación por la vía más corta y, como negativo el sentido horario en el que el vector busca el centro de rotación por la vía más corta” (Arcila y cols., 2012). En general, para una fuerza oblicua ocurre lo siguiente:
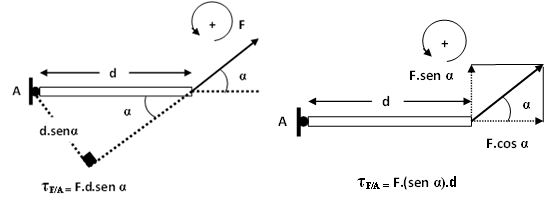
Figura Nº 2. Torque de una fuerza (Arcila y cols., 2012)
El símbolo ![]() se lee “el torque de la fuerza F respecto al centro de rotación A”.
se lee “el torque de la fuerza F respecto al centro de rotación A”.
Cuando la fuerza F es perpendicular al eje mecánico de la palanca, se
tiene ![]()
Observe que cuando la fuerza F es oblicua, el torque es el mismo torque
de su componente perpendicular al eje mecánico. Cuando la fuerza F está
sobre el eje mecánico de la palanca, se tiene ![]()
Así que, todas aquellas fuerzas cuyas líneas de acción pasen por el centro de rotación, no producen torque” (Arcila y cols., 2012).
En el caso de una fuerza muscular oblicua que actúa sobre una palanca ósea, el componente perpendicular de dicha fuerza es denominado componente tangencial, porque es tangente a la trayectoria de los puntos de la palanca influyendo sobre su velocidad del movimiento, razón por la cual se le llama “de rotación” o “patente”. A la componente paralela denominada normal, la cual presiona unas contra otras las superficies fijando la articulación se le llama “de reforzamiento” o “latente”. (Zatsiorski, 1990).
Es importante tener en cuenta el conjunto total de fuerzas que actúan sobre una palanca: en la Figura Nº 3 se ilustran las fuerzas que actúan sobre la palanca del antebrazo-muñeca-mano-carga externa en una flexión de codo por acción del músculo bíceps braquial.
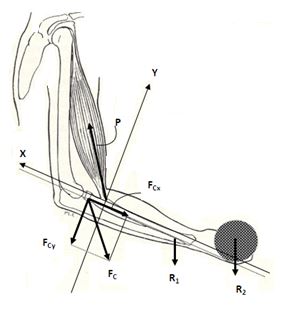
Figura Nº 3. Conjunto de fuerzas actuando sobre una palanca
(Análisis hecho sobre esquema de Luttgens & Wells, 1982)
Como se ha descrito, es la fuerza voluntaria que se aplica sobre la palanca con alguna intencionalidad. Específicamente, nos interesa la fuerza muscular que se aplica sobre un segmento anatómico con el objetivo de movilizarlo y/o soportar o levantar una carga externa adicional.1. Potencia (P):
2. Resistencia (R): Es la fuerza total a vencer. Específicamente, nos interesa la conformada por el peso de la barra o segmento anatómico (R1) y el peso del objeto que levanta (R2). Teniendo en cuenta la tercera ley de Newton (Acción y Reacción), la fuerza ejercida por la carga externa sobre la barra o segmento anatómico, debe ser igual en valor numérico a la fuerza que la barra o segmento anatómico ejerce sobre la carga externa, pero poseen sentidos opuestos.
3. Fuerza de contacto (FC): Es la fuerza de apoyo ejercida por el fulcro sobre la palanca, la cual posee en general dos componentes rectangulares: el componente paralelo al eje mecánico (FCx) y el componente perpendicular al eje mecánico (FCy). En las articulaciones humanas de acuerdo a la tercera ley de Newton o ley de acción y reacción, el primero se opone al componente de la fuerza muscular paralelo al eje mecánico (Herrera, 2001) y, el segundo se opone al componente rotatorio.
Ventaja mecánica en una palanca
La ventaja mecánica real (VMR) de una máquina se define como el cociente entre
la fuerza ejercida por la máquina sobre la carga (Resistencia = R )
y la fuerza necesaria para operar la máquina (Potencia = P ). La
ventaja mecánica ideal (VMI) se define como el cociente entre el brazo de
potencia y el brazo de resistencia. La presencia de fuerzas disipativas
expresadas principalmente como fricciones, hacen que la ventaja mecánica real
sea siempre menor que la ventaja mecánica ideal ![]()
Se dice que hay ventaja mecánica solo si ambos cocientes son mayores que 1, es
decir, si ![]()
En la primera relación de orden ![]() lo que significa en un gesto articular que la fuerza muscular aplicada es menor
que la carga movilizada.
lo que significa en un gesto articular que la fuerza muscular aplicada es menor
que la carga movilizada.
En la segunda relación de orden ![]() lo que significa que la distancia perpendicular de la potencia al apoyo es mayor
que la distancia perpendicular de la resistencia al apoyo.
lo que significa que la distancia perpendicular de la potencia al apoyo es mayor
que la distancia perpendicular de la resistencia al apoyo.
En una palanca en equilibrio la suma de los torques respecto al fulcro es nula
y, de acuerdo a la ley de las palancas ![]() para sistemas no acelerados como es el caso del gimnasta sostenido sobre las
barras y las ejecuciones de un montañista en la escalada, que obedecen a un
equilibrio de rotación en el que
para sistemas no acelerados como es el caso del gimnasta sostenido sobre las
barras y las ejecuciones de un montañista en la escalada, que obedecen a un
equilibrio de rotación en el que ![]() Este es el “principio dorado de la mecánica” (Bäumler et al., 1989)
que se puede reescribir
Este es el “principio dorado de la mecánica” (Bäumler et al., 1989)
que se puede reescribir ![]() lo cual significa que manteniendo constante la carga, la fuerza que debe
aplicarse varía en forma directamente proporcional con el cociente entre los
brazos de resistencia y de potencia. Así, cuando el brazo de resistencia se
hace mayor, el cociente entre los brazos aumenta, en consecuencia, la fuerza
necesaria para movilizar la carga debe aumentar y, el desplazamiento lineal de
la misma es mayor. En cambio, cuando el brazo de resistencia se hace menor, el
cociente entre los brazos disminuye, en consecuencia, la fuerza necesaria para
movilizar la carga disminuye y, el desplazamiento lineal de la misma es menor.
lo cual significa que manteniendo constante la carga, la fuerza que debe
aplicarse varía en forma directamente proporcional con el cociente entre los
brazos de resistencia y de potencia. Así, cuando el brazo de resistencia se
hace mayor, el cociente entre los brazos aumenta, en consecuencia, la fuerza
necesaria para movilizar la carga debe aumentar y, el desplazamiento lineal de
la misma es mayor. En cambio, cuando el brazo de resistencia se hace menor, el
cociente entre los brazos disminuye, en consecuencia, la fuerza necesaria para
movilizar la carga disminuye y, el desplazamiento lineal de la misma es menor.
En una palanca que no está en equilibrio, la suma de torques respecto al fulcro
es diferente de cero ![]() como en el caso de los segmentos anatómicos que rotan aceleradamente en muchos
gestos deportivos como los lanzamientos en atletismo y las patadas al balón en
fútbol.
como en el caso de los segmentos anatómicos que rotan aceleradamente en muchos
gestos deportivos como los lanzamientos en atletismo y las patadas al balón en
fútbol.
Género de palanca
Hay tres tipos de palanca dependiendo de la ubicación relativa de los puntos críticos (puntos de apoyo y puntos de aplicación de las fuerzas). Para facilitar el análisis, se considera que las líneas de acción de los vectores fuerza (potencia y resistencia) son perpendiculares al eje mecánico de la palanca
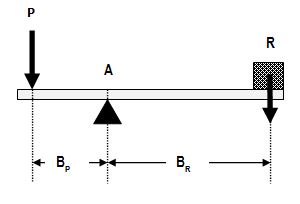
Primer género: Aquella en la cual el punto de apoyo está ubicado entre los puntos de aplicación de la potencia y de la resistencia. Se denomina también inter-apoyo, inter-fija o de equilibrio. Pueden ocurrir tres situaciones:
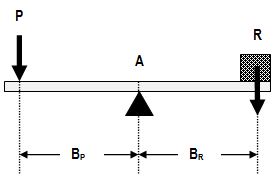
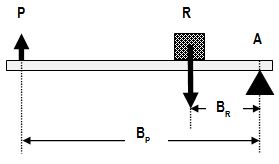
1. El punto de apoyo está ubicado precisamente en la mitad de la distancia que hay entre los puntos de aplicación de P y de R tal como se muestra en la figura Nº 4:
Figura Nº 4. Palanca de primer género donde los brazos son iguales
En este caso
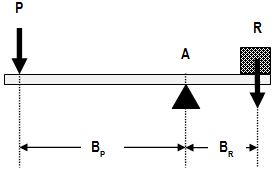
2. El punto de apoyo está ubicado más próximo al punto de aplicación de P:
Figura Nº 5. Palanca de primer género donde el brazo de potencia es menor
En este caso
y no obtiene V.M. En esta situación debe realizarse más fuerza para levantar la misma carga que en la situación anterior.
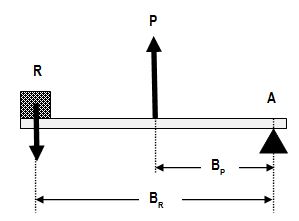
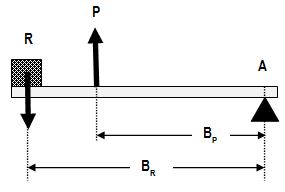
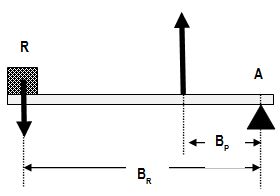
3. El punto de apoyo está ubicado más próximo al punto de aplicación de R:
Figura Nº 6. Palanca de primer género donde el brazo de potencia es mayor
En este caso
Segundo género: Aquella en la cual el punto de aplicación de la resistencia está ubicado entre los puntos de aplicación de la potencia y del apoyo. Se denomina también inter-resistente o favorable a la fuerza, dado que hay que aplicar menos fuerza para levantar la carga. Pueden ocurrir tres situaciones:
1. El punto de aplicación de R está ubicado precisamente en la mitad de la distancia que hay entre los puntos de aplicación de P y el apoyo como se muestra en la gráfica:
Figura Nº 7. Palanca de segundo género donde el brazo de potencia es el doble
En este caso
2. El punto de aplicación de R está ubicado más próximo al punto de aplicación de P:
Figura Nº 8. Palanca de segundo género donde el brazo de potencia es menor que el doble
En este caso
y obtiene V.M. cuyo valor es mayor que 1 y menor que 2, es decir, hay que aplicar más fuerza que en el caso anterior para levantar la misma carga.
3. El punto de aplicación de R está ubicado más próximo al punto de apoyo:
Figura Nº 9. Palanca de segundo género donde el brazo de potencia es mayor que el doble
En este caso
y obtiene V.M. cuyo valor es mayor que 2, es decir, aquí se levanta la misma carga aplicando menos fuerza que en las situaciones anteriores.
Observamos que en las palancas de segundo género siempre ocurre que
por lo que siempre obtienen ventaja mecánica.
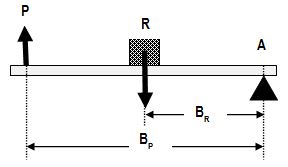
Tercer género: Aquella en la cual el punto de aplicación de la potencia está ubicado entre los puntos de aplicación de la resistencia y el apoyo. Se denomina también inter-potente, de velocidad o desfavorable a la fuerza, dado que hay que aplicar más fuerza para levantar la carga. Pueden ocurrir tres situaciones:
1. El punto de aplicación de P está ubicado precisamente en la mitad de la distancia que hay entre los puntos de aplicación de R y del apoyo como se muestra en la gráfica:
Figura Nº 10. Palanca de tercer género donde el brazo de resistencia es el doble
En este caso
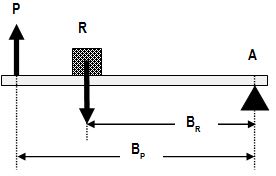
2. El punto de aplicación de P está ubicado más próximo al punto de aplicación de R:
Figura Nº 11. Palanca de tercer género donde el brazo de resistencia es menor que el doble
En este caso
y no obtiene V.M. ya que el valor numérico del cociente es mayor que 0,5 pero menor que 1. En esta situación se aplica menos fuerza que en el caso anterior para levantar la misma carga.
3. El punto de aplicación de P está ubicado más próximo al punto de apoyo:
Figura Nº 12. Palanca de tercer género donde el brazo de resistencia es mayor que el doble
En este caso
y no obtiene V.M. ya que el valor numérico del cociente es menor que 0,5 (y por tanto es menor que 1). En esta situación se aplica más fuerza que en los dos casos anteriores para levantar la misma carga.
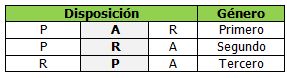
Una nemotecnia para recordar los géneros de palancas es el conjunto ordenado de iniciales A-R-P que representan los elementos de palanca y que se disponen verticalmente en la columna central de la siguiente tabla:
Tabla Nº 2. Tipo de palanca
Observamos que en las palancas de tercer género siempre ocurre que ![]() por lo que nunca obtienen ventaja mecánica.
por lo que nunca obtienen ventaja mecánica.
La mayoría de palancas en el cuerpo humano son de tercer género, esto significa que no está construido para obtener ventaja mecánica levantando cargas, sino más bien para generar desplazamientos de los segmentos. En la mayoría de las ocasiones, el brazo de potencia en el sistema osteomuscular humano, es más corto que el brazo de resistencia. Así, las palancas anatómicas tienden a favorecer la velocidad y el grado de movimiento (amplitud) a expensas del esfuerzo (Luttgens y Wells, 1982). “Los músculos esqueléticos desarrollan fuerzas mayores que las cargas que soportan; sin embargo, las cargas pueden moverse mucho más de lo que se contrae el músculo” (Piña, 2002). Acciones cotidianas como las extensiones y flexiones de rodilla durante la marcha, levantar un objeto flexionando el codo y patear un balón extendiendo la rodilla, son ejemplos simples de gestos que requieren de una gran fuerza muscular (mayor que la carga levantada) pero que se caracterizan por un desplazamiento importante de la parte distal del segmento anatómico movilizado. El hecho de levantar flexionando el codo con el antebrazo supinado, un alimento para llevarlo a la boca, implica por parte del bíceps braquial la ejecución de una fuerza más de 6 veces superior (Tuszynski, 2001) a la carga levantada (peso del segmento anatómico antebrazo-muñeca-mano más el peso del alimento levantado, por liviano que sea), con un brazo de potencia muy inferior al brazo de resistencia, indicando ausencia de ventaja mecánica, pero con un efecto compensador importante expresado en el desplazamiento de la mano para cumplir eficazmente con el propósito del gesto. Si el punto de inserción del bíceps no estuviera ubicado en la tuberosidad radial, sino que fuera tan distal como para quedar más alejado del codo que el baricentro de la carga, de modo que produjera ventaja mecánica, disminuiría bastante la fuerza que debería ejercer el músculo bíceps (incluso de manera razonable su sección transversal sería menor), pero la reducción del desplazamiento de la mano, generaría gastos energéticos importantes en la musculatura cervical y torácica que tendrían que actuar en una búsqueda forzada del alimento. En este sentido, cuando se activan en contracción concéntrica, los músculos de origen lejano e inserción cercana con respecto al fulcro articular, se producen grandes amplitudes de movimiento (Grosser et al., 1991), es decir, un movimiento muy pequeño del extremo corto de la palanca queda magnificado en proporción directa a la longitud de la palanca que se está movilizando (Gowitzke and Milner, 1999). En cambio, cuando se activan en contracción concéntrica, los músculos de origen cercano e inserción lejana, las amplitudes de movimiento son claramente inferiores.
La denominada por muchos “desventaja mecánica” de las palancas anatómicas corporales humanas, por el hecho de ser el cociente entre los brazos de potencia y de resistencia, menor o igual que 1, es coherente con el hecho de cierta delgadez relativa de los músculos para ubicarse paralelamente al hueso y con la característica contráctil (concéntrica) del músculo estriado que lo lleva a adquirir una longitud un 30% menor de la original (MacDonald, 1989). Si obtuvieran ventaja mecánica, con un cociente mayor que 1, tal como se explicó anteriormente, los movimientos articulares serían ineficaces.
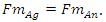
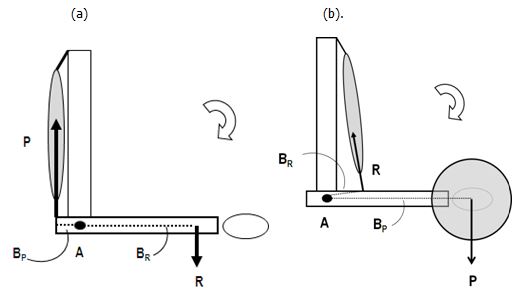
Un modelo simple del funcionamiento de estas palancas no ventajosas se muestra a continuación:
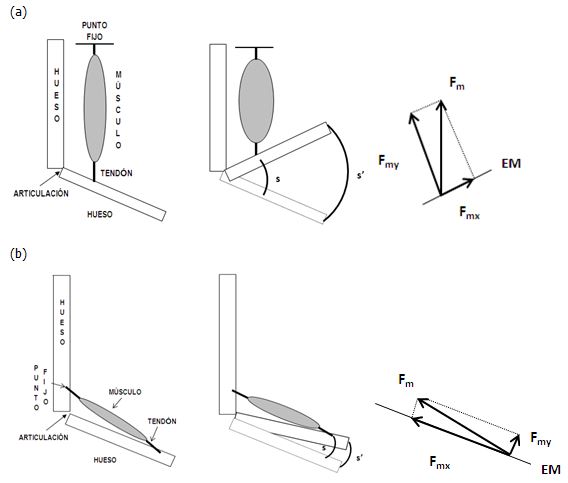
Figura Nº 13. Modelo de funcionamiento de palancas anatómicas no ventajosas:
(a) Músculos de origen lejano e inserción cercana, (b). Músculos de origen cercano e inserción lejana
Observando la figura Nº 13 (a) de la derecha nos damos cuenta que el músculo se ha contraído en forma concéntrica generando un desplazamiento s del punto de inserción tendinosa y un desplazamiento s’ mucho mayor del extremo distal, lo que significa que el hueso es un amplificador del movimiento producido por el músculo, compensando de esta forma el gasto energético alto de la contracción muscular requerido para generar una fuerza muscular mucho mayor que el peso de la palanca movilizada.
Concluimos que los músculos de origen lejano e inserción cercana con respecto a la misma articulación, que generan un importante componente perpendicular (Fmy) al eje mecánico del hueso que representa la palanca movilizada, son músculos de movimiento o de velocidad, al poseer un claro efecto rotatorio que garantiza una muy buena amplitud expresada en un desplazamiento lineal importante de las partes más distales de la palanca. Aquí, al punto de inserción proximal del músculo, lo denominamos “origen” y, al punto de inserción distal lo denominamos simplemente “punto de inserción”. La posición de estos puntos es innata y no se modifica (Ahonem, 2013). De modo que la capacidad del músculo para producir fuerza, depende del entrenamiento de la misma y no de la variación de la distancia que hay entre el apoyo y el punto de aplicación de la fuerza muscular. Así, las personas son más idóneas para realizar ciertas actividades en las que se requiere un rendimiento máximo absoluto. En general, los músculos cuyo componente rotatorio es predominante, actúan en un ángulo de tensión muscular (o de tracción) superior a 45º (Miralles, 2002). En cambio, los músculos de origen cercano e inserción lejana con respecto a la misma articulación (figura Nº 13b), que generan un importante componente paralelo (Fmx) al eje mecánico del hueso que representa la palanca movilizada, producen un efecto más estabilizador, de sostén o contención. En general, los músculos cuyo componente estabilizador es predominante, actúan en un ángulo de tensión muscular (o de tracción) inferior a 45º (Miralles, 2002).
Presentamos a continuación un modelo de la acción combinada de agonistas, sinergistas y antagonistas en el sistema osteomuscular del codo para una flexión con antebrazo supinado:
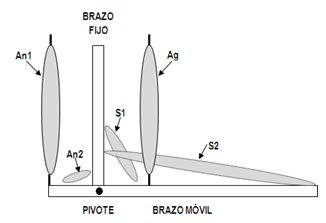
Figura Nº 14. Modelo de la acción muscular combinada en la articulación de codo
Ag = Músculo agonista (Bíceps braquial)
S1 = Músculo sinergista uno (Braquial anterior)
S2 = Músculo sinergista dos (Braquiorradial)
An1 = Músculo antagonista uno (Tríceps braquial)
An2 = Músculo antagonista dos (Ancóneo)
Brazo fijo = Segmento anatómico del brazo
Brazo móvil = Segmento anatómico antebrazo-muñeca-mano
El efecto combinado de agonistas y sinergistas se representa por un vector
fuerza cuya componente perpendicular al eje mecánico del brazo móvil es la
suma de los componentes perpendiculares de las fuerzas ejercidas por agonista y
sinergistas ![]() De manera similar, el efecto combinado de antagonistas se representa por un
vector fuerza cuya componente perpendicular al eje mecánico del brazo móvil es
la suma de los componentes perpendiculares de las fuerzas de todos los
antagonistas:
De manera similar, el efecto combinado de antagonistas se representa por un
vector fuerza cuya componente perpendicular al eje mecánico del brazo móvil es
la suma de los componentes perpendiculares de las fuerzas de todos los
antagonistas: ![]()
Los componentes paralelas al eje mecánico de todas las fuerzas involucradas representan efectos estabilizadores, luxadores y de contacto articular, que finalmente se deben expresar preservando la integridad articular, en caso contrario, sobrevienen las lesiones del codo.
De esta forma podemos simplificar el esquema representando los efectos agonistas y antagonistas como sigue:
![]()
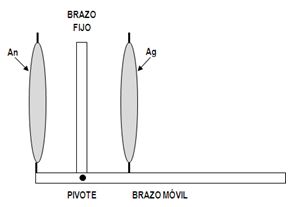
Figura Nº 15. Análisis de fuerzas agonistas y antagonistas
Analicemos tres situaciones:
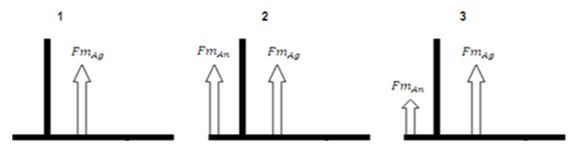
Figura Nº 16. Análisis vectorial de fuerzas agonistas y antagonistas
-
Rendimiento máximo: Situación fisiológicamente imposible que consiste en la contracción exclusiva del músculo agonista sin oposición del músculo antagonista
 En este caso, el trabajo externo expresado en movimiento,
requiere de un solo motor muscular, por lo que el rendimiento energético es
muy alto.
En este caso, el trabajo externo expresado en movimiento,
requiere de un solo motor muscular, por lo que el rendimiento energético es
muy alto. -
Rendimiento mínimo: Situación fisiológicamente posible que consiste en la contracción simultánea de músculos agonistas y antagonistas, ejerciendo fuerzas de igual módulo
 No hay movimiento y el rendimiento del
sistema es nulo, situación típica de las contracciones isométricas. En
este caso, debido a que ambos motores se contraen sin generar movimiento
alguno, cursa con un alto gasto de energía interna pero sin producir
trabajo externo, minimizando el rendimiento energético.
No hay movimiento y el rendimiento del
sistema es nulo, situación típica de las contracciones isométricas. En
este caso, debido a que ambos motores se contraen sin generar movimiento
alguno, cursa con un alto gasto de energía interna pero sin producir
trabajo externo, minimizando el rendimiento energético. -
Contracción simultánea de músculos agonistas y antagonistas, ejerciendo el agonista un módulo de fuerza mayor que el antagonista
 . Se realiza movimiento a
cargo del agonista pero controlado por la oposición que ejerce el
antagonista para que no se exceda el límite fisiológico y se preserve la
integridad articular. Es el caso más frecuente de las contracciones
concéntricas donde los músculos agonistas deben intervenir en forma
regulada cumpliendo el principio dinámico de economía del gesto, activando
solo el número de fibras necesarias para cumplir el objetivo del
movimiento. Un reclutamiento de un número menor de fibras resulta
insuficiente para desarrollar la acción y, un número muy superior de
fibras, generaría señales que aumentarían el efecto antagonista
dificultando igualmente la acción. Otro parámetro importante en el
desarrollo preciso y eficaz del movimiento articular, es el tiempo referido
al momento en el cual se debe producir la activación de los músculos
antagonistas. Una activación precoz frena bruscamente el movimiento, lo
torna aparatoso, forzado y poco fluido, lo que se traduce en pérdida
energética (Fucci et al., 1998). Una activación tardía favorece una mayor
intensidad de la fuerza aplicada permitiendo superar la resistencia tisular
de algunos componentes articulares y, en consecuencia se produce una lesión
estructural. En general, la musculatura antagonista debe intervenir en la
fase terminal de la contracción de agonistas para evitar mayor disipación
de energía y lograr versatilidad en la ejecución. En las actividades
deportivas se pretende obtener el mayor trabajo externo utilizando una
mínima cantidad de energía.
. Se realiza movimiento a
cargo del agonista pero controlado por la oposición que ejerce el
antagonista para que no se exceda el límite fisiológico y se preserve la
integridad articular. Es el caso más frecuente de las contracciones
concéntricas donde los músculos agonistas deben intervenir en forma
regulada cumpliendo el principio dinámico de economía del gesto, activando
solo el número de fibras necesarias para cumplir el objetivo del
movimiento. Un reclutamiento de un número menor de fibras resulta
insuficiente para desarrollar la acción y, un número muy superior de
fibras, generaría señales que aumentarían el efecto antagonista
dificultando igualmente la acción. Otro parámetro importante en el
desarrollo preciso y eficaz del movimiento articular, es el tiempo referido
al momento en el cual se debe producir la activación de los músculos
antagonistas. Una activación precoz frena bruscamente el movimiento, lo
torna aparatoso, forzado y poco fluido, lo que se traduce en pérdida
energética (Fucci et al., 1998). Una activación tardía favorece una mayor
intensidad de la fuerza aplicada permitiendo superar la resistencia tisular
de algunos componentes articulares y, en consecuencia se produce una lesión
estructural. En general, la musculatura antagonista debe intervenir en la
fase terminal de la contracción de agonistas para evitar mayor disipación
de energía y lograr versatilidad en la ejecución. En las actividades
deportivas se pretende obtener el mayor trabajo externo utilizando una
mínima cantidad de energía.
Sugerimos el siguiente formato para el análisis de las palancas anatómicas:
Tabla Nº 3. Formato para el análisis de palanca en el gesto articular
|
0. Esquema |
Hacer un esquema aproximado del gesto que se analiza indicando el punto de apoyo, los puntos de aplicación de la potencia y de la resistencia, los vectores potencia y resistencia, los brazos de potencia y de resistencia. |
|
1. Nombre del gesto |
Escribir en forma completa y precisa la denominación del gesto, calificándolo de “activo” cuando el movimiento es producido por el músculo agonista expresando la posición del segmento anatómico que pudiese modificar la participación funcional de los músculos, y de “pasivo” cuando es producido por una fuerza externa. En caso de levantar o descargar objetos, describir con precisión la manera en que se realiza. |
|
2. Apoyo |
Identificar y enunciar la ubicación aproximada del fulcro en la palanca anatómica, la cual corresponde generalmente a la centroda de la principal articulación implicada en el movimiento de la palanca. |
|
3. Resistencia |
Enunciar claramente la fuerza de oposición que hay que vencer y que corresponde generalmente al peso de la palanca anatómica más el peso de la carga que se moviliza. Aquí no se considera la fuerza reguladora de los músculos antagonistas, aunque en realidad formen parte de los factores de resistencia a vencer. En algunos casos esta resistencia corresponde a una fuerza muscular de contracción excéntrica, que es vencida gradualmente por una fuerza externa (Peso de un disco o fuerza elástica de un theraband). |
|
4. Punto de aplicación de la resistencia |
Describir la ubicación aproximada del punto donde se aplica la resistencia, en general es el baricentro del segmento corporal que se moviliza, el cual estará desplazado distalmente en caso de movilizar una carga adicional. |
|
5. Potencia |
Enunciar claramente la fuerza que produce el movimiento, la cual corresponde generalmente a la ejercida por el músculo agonista del gesto o por el grupo muscular cuando se incluyen sinergistas. En algunos casos esta potencia corresponde a una fuerza externa (Peso de un disco o fuerza elástica de un theraband), en cuyo caso se trata de un gesto pasivo. |
|
6. Punto de aplicación de la potencia |
Describir la ubicación exacta del punto de aplicación de la fuerza que representa la potencia de la palanca. En caso de gestos activos, se trata del punto de inserción distal del músculo agonista. En caso de gestos pasivos, se trata del baricentro del segmento más carga o del punto de aplicación de una fuerza elástica. |
|
7. Disposición de los elementos |
Identificar el orden en que están ubicados los puntos de aplicación de los elementos de palanca (PAR, PRA, RPA) para determinar cuál de los elementos se encuentra aplicado entre los otros dos. |
|
8. género de palanca |
Calificar si la palanca es de primero, segundo o tercer género de acuerdo a la disposición de los elementos (PAR = primer género o inter-fija, PRA = segundo género o inter-resistente, RPA = tercer género o inter-potente). |
|
9. Ventaja mecánica |
Decidir si la palanca obtiene ventaja mecánica o no, analizando la relación de orden entre los brazos de fuerza (Si BP ≤ BR ocurre que BP / BR ≤ 1 por lo que no hay VM, si BP > BR ocurre que BP / BR > 1 por lo que si hay VM) |
|
10. Discusión |
Hacer un breve análisis sobre la caracterización funcional de la palanca (equilibrio, fuerza o velocidad) en el gesto articular y la influencia de posibles variaciones en la ubicación de sus elementos. |
Atención: La caracterización y análisis de una palanca anatómica no puede hacerse bajo una perspectiva estática, obedece a consideraciones dinámicas en las que el rango angular del movimiento y el ángulo articular instantáneo, determinan el grado de participación y la clasificación funcional de los músculos involucrados en el gesto. Obviamente, el efecto total en la realización de un gesto, está dado por la suma vectorial de todas las fuerzas musculares favorecedoras involucradas (agonistas, sinergistas y auxiliares), el cual corresponde a una fuerza resultante que se aplica en un nuevo baricentro que puede ser determinado mediante ecuaciones conociendo los valores de las fuerzas y sus puntos de aplicación (inserciones distales). Las aplicaciones aquí presentadas, se tratan de manera simplificada, sin perder la esencia de los elementos mecánicos involucrados en el gesto articular.
Aplicaciones
1. Flexión de codo
Figura Nº 17. Flexión activa de codo en supino:
(a) Movilizando el segmento anatómico sin carga adicional.
(b) En un curl de bíceps levantando una carga adicional (disco)
Descripción del gesto 17(a): Flexión del codo con antebrazo supinado (también conocido como flexión del antebrazo sobre el brazo, con antebrazo supinado), sin carga adicional
A: Centroda de la articulación de codo
R: Peso del segmento anatómico antebrazo-muñeca-mano aplicado en el baricentro del segmento ubicado aproximadamente en la unión de los dos tercios proximales con el tercio distal del antebrazo
P: Fuerza muscular del bíceps braquial aplicada en la tuberosidad bicipital del radio
Disposición de los elementos: A-P-R
Género de palanca: 3, inter-potente
Ventaja mecánica: Como BP < BR, ocurre que BP / BR <1 por lo que no obtiene VM
Discusión: Aunque no se obtiene ventaja mecánica y la fuerza muscular del bíceps braquial es de aproximadamente 6 a 8 veces el peso del segmento anatómico que se levanta, el beneficio importante es el gran desplazamiento lineal de los puntos más distales de la palanca. Esta circunstancia es la que nos permite por ejemplo, como ya lo hemos anotado, llevar con la mano los alimentos a la boca. La contracción en este gesto es concéntrica ya que se produce un acortamiento del músculo al aproximar sus inserciones. En el caso de flexionar el codo sosteniendo un objeto en la mano (figura Nº 17b) como por ejemplo una mancuerna en el deporte de la halterofilia (curl de bíceps), se aumenta la resistencia de la palanca porque el peso es ahora la sumatoria del peso del segmento anatómico antebrazo-muñeca-mano y del peso de la mancuerna, lo que hace que el baricentro se desplace distalmente hacia la mano aumentando la longitud del brazo de resistencia y dificultando el movimiento. No obstante, esta palanca sigue siendo de tercer género y se acostumbra representar el punto de aplicación de la resistencia en el baricentro del disco. Si se realiza una flexión de codo luchando contra una banda elástica ubicada por ejemplo a manera de brazalete en la mitad del antebrazo, también se incrementa el valor de la resistencia, el cual resulta de sumar el peso del segmento anatómico con el valor de la resistencia ejercida por la banda; esto hace que el baricentro se desplace proximalmente hacia el codo disminuyendo la longitud del brazo de resistencia y facilitando el movimiento.
Al considerar el codo en flexión, el músculo bíceps braquial no actúa solo como flexor del antebrazo, también actúa como un supinador potente, ya que en esta posición, su línea de acción muscular es casi perpendicular al eje de prono-supinación, el cual pasa por el centro del cóndilo humeral externo, por el punto medio de la cabeza radial y por la apófisis estiloides del cúbito. “Por esto, los movimientos de supinación con el codo flexionado son especialmente efectivos” (Schünke et al., 2011).
2. Extensión de codo
Figura Nº 18. Extensión de codo:
(a) Activa movilizando el segmento anatómico sin carga adicional.
(b) Pasiva por efecto gravitatorio descargando gradualmente una mancuerna
Gesto figura 18 (a)
Descripción del gesto: Extensión activa del codo, también conocido como extensión activa del antebrazo respecto al brazo
A: Centroda de la articulación de codo
R: Peso del segmento anatómico antebrazo-muñeca-mano aplicado en el baricentro del segmento ubicado aproximadamente en la unión de los dos tercios proximales con el tercio distal del antebrazo
P: Fuerza muscular del tríceps braquial aplicada en el olécranon cubital
Disposición de los elementos: P-A-R
Género de palanca: 1, inter-fija
Ventaja mecánica: Como BP < BR, ocurre que BP / BR <1 por lo que no obtiene VM
Discusión: A partir de determinada posición del codo flexionado, el antebrazo tiene la tendencia natural a extenderse pasivamente (caer por efecto de la gravedad) por la acción de una fuerza externa que es el peso mismo del segmento anatómico. Por eso, el hecho de calificar la extensión como activa, implica la participación muscular del tríceps braquial como agonista del gesto. Una posición más razonable se daría a partir de una flexión de hombro de 90º con el codo flexionado, de manera que el antebrazo descanse sobre el brazo, situación que implicaría activar el músculo tríceps braquial para levantar el antebrazo en contra de la gravedad. El papel del músculo tríceps braquial como agonista en este gesto no depende de la posición del antebrazo (en prono, supino o neutro).
Gesto figura 18 (b)
Descripción del gesto: Extensión pasiva del codo por efecto gravitatorio, descargando gradualmente una mancuerna
A: Centroda de la articulación de codo
R: Fuerza muscular del bíceps braquial aplicada en la tuberosidad bicipital del radio, en una contracción excéntrica en la que aleja sus inserciones oponiéndose a la extensión y descenso acelerado de la extremidad
P: Peso conjunto del segmento anatómico antebrazo-muñeca-mano y de la mancuerna, aplicado en el baricentro, el cual se encuentra ubicado distalmente, se acostumbra ubicarlo en el centro de gravedad de la mancuerna
Disposición de los elementos: A-R-P
Género de palanca: 2, inter-resistente
Ventaja mecánica: Como BP >BR, ocurre que BP / BR >1 por lo que si obtiene VM
Discusión: En los gimnasios encontramos muchas palancas de este género cuando se trabaja descargando las extremidades contra fuerzas externas ejecutadas por discos (Pesos) o por los elásticos (Fuerzas recuperadoras). En general, los pesos de los segmentos anatómicos, resultan ser muy inferiores a las fuerzas externas consideradas, razón por la cual el punto de aplicación de la potencia se acostumbra representarlo en el baricentro del disco o en el punto de contacto del elástico.
3. Supinación del antebrazo
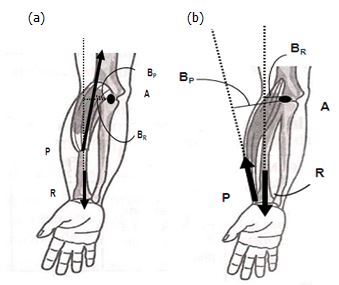
Figura Nº 19. Supinación activa de codo:
(a) Suponiendo una acción aislada del músculo supinador corto.
(b) Suponiendo una acción aislada del músculo supinador largo (Braquiorradial)
(Análisis hecho sobre esquemas de Molano, 2008)
Gesto figura 19 (a)
-
Descripción del gesto: Supinación del antebrazo con el codo flexionado 90º suponiendo una acción aislada del supinador corto
-
A: Centroda de la articulación de codo
-
R: Peso del segmento anatómico antebrazo-muñeca-mano aplicado en el baricentro del segmento ubicado aproximadamente en la unión de los dos tercios proximales con el tercio distal del antebrazo
-
P: Fuerza muscular del supinador corto aplicada en la cara dorso-lateral del radio en el tercio superior
-
-
Disposición de los elementos: A-P-R
-
Género de palanca: 3, inter-potente
-
Ventaja mecánica: Como BP < BR, ocurre que BP / BR <1 por lo que no obtiene VM
-
Discusión: Realmente, la supinación del codo es el resultado de la acción conjunta de varios músculos, donde el supinador corto es apenas un sinergista de la función, de tal forma que considerando el movimiento global puede obtenerse una palanca anatómica de otro género (generalmente tercero) que absorbe el efecto de las palancas consideradas aisladamente.
Gesto figura 19 (b)
-
Descripción del gesto: Supinación del antebrazo con el codo flexionado 90º suponiendo una acción aislada del supinador largo
-
A: Centroda de la articulación de codo
-
R: Peso del segmento anatómico antebrazo-muñeca-mano aplicado en el baricentro del segmento ubicado aproximadamente en la unión de los dos tercios proximales con el tercio distal del antebrazo
-
P: Fuerza muscular del supinador largo aplicada en la apófisis estiloides del radio
-
-
Disposición de los elementos: A-R-P
-
Género de palanca: 2, inter-resistente
-
Ventaja mecánica: Como BP >BR, ocurre que BP / BR >1 por lo que si obtiene VM
-
Discusión: El pequeño esfuerzo que realiza este músculo, en comparación con la resistencia vencida, va acompañado de un desplazamiento muy pequeño, situación que explica porque es considerado un ayudante o sinergista en el movimiento, pero no es el motor principal.
-
Además, teniendo en cuenta que el bíceps braquial es un potente flexor del antebrazo en la articulación del codo, y que es el supinador más potente del antebrazo cuando el codo está flexionado, estas condiciones generan una palanca anatómica de tercer género, donde el esfuerzo muscular supera la resistencia del peso del segmento, pero se ve compensada por una rotación amplia del eje radial hacia afuera. Este es el caso de una supinación pura (codo en flexión de 90º), que corresponde a la posición en la cual se debe examinar la prono-supinación del antebrazo para eliminar la participación de la articulación gleno-humeral. Aunque en la prono-supinación pura intervienen dos articulaciones (radio-cubital proximal y radio-cubital distal), nos centramos en el efecto de palanca respecto a la proximal.
-
4. Pronación del antebrazo
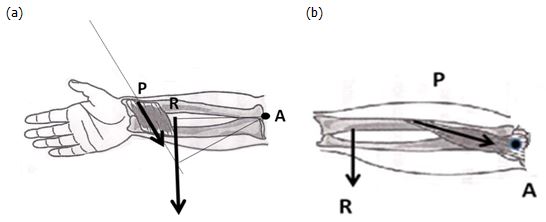
Figura Nº 20. Pronación activa de codo:
(a) Suponiendo una acción aislada del músculo pronador cuadrado.
(b) Suponiendo una acción aislada del músculo pronador redondo (Análisis hecho sobre esquemas de Molano, 2008)
Gesto figura 20 (a)
-
Descripción del gesto: Pronación activa del antebrazo con el codo en flexión de 90º y suponiendo una acción aislada del pronador cuadrado
-
A: Centroda de la articulación de codo
-
R: Peso del segmento anatómico antebrazo-muñeca-mano aplicado en el baricentro del segmento ubicado aproximadamente en la unión de los dos tercios proximales con el tercio distal del antebrazo
-
P: Fuerza muscular del pronador cuadrado aplicada en la cara distal anterior del radio
-
-
Disposición de los elementos: A-R-P
-
Género de palanca: 2, inter-resistente
-
Ventaja mecánica: Si obtiene

Gesto figura 20 (b)
-
Descripción del gesto: Pronación activa del antebrazo con el codo en flexión de 90º y suponiendo una acción aislada del pronador redondo
-
A: Centroda de la articulación de codo
-
R: Peso del segmento anatómico antebrazo-muñeca-mano aplicado en el baricentro del segmento ubicado aproximadamente en la unión de los dos tercios proximales con el tercio distal del antebrazo
-
P: Fuerza muscular del pronador redondo aplicada en la cara lateral del tercio medio del radio
-
-
Disposición de los elementos: A-P-R
-
Género de palanca: 3, interpotente
-
Ventaja mecánica: No obtiene

-
Discusión: En forma análoga al análisis de la supinación del codo, la pronación del codo es el resultado de la acción conjunta de dos músculos, donde el pronador cuadrado, de inserción lejana con respecto a la articulación de codo, además de participar en la rotación interna del antebrazo siendo el principal responsable de desplazar el extremo distal del radio sobre el cúbito (Drake et al., 2007), juega un rol estabilizador de la articulación radio-cubital distal, de tal forma que considerando la acción sinérgica del pronador redondo en el movimiento global, puede obtenerse una palanca anatómica de otro género (generalmente tercero) que absorbe el efecto de las palancas consideradas aisladamente.
5. Plantiflexión
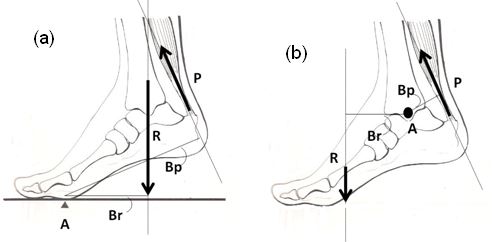
Figura Nº 21. Plantiflexión activa:
(a) En la acción de empinada bipodal haciendo contacto con la superficie
(b) Sin hacer contacto con la superficie (Análisis hecho sobre esquemas de Fucci y cols., 1998)
Gesto figura 21 (a)
-
Descripción del gesto: Flexión plantar con apoyo bipodal en la superficie
-
A: Punto de apoyo del pie sobre el terreno, el cual corresponde en el antepié a las primeras articulaciones metatarso-falángicas en contacto con la superficie
-
R: Mitad del peso corporal que se transmite verticalmente a través de la articulación tibio-peroneo-astragalina
-
P: Fuerza muscular del tríceps sural que se transmite a través del tendón de Aquiles y se aplica en la parte superior de la tuberosidad del calcáneo
-
-
Disposición de los elementos: A-R-P
-
Género de palanca: 2, inter-resistente
-
Ventaja mecánica: Si obtiene

Gesto figura 21 (b)
-
Descripción del gesto: Flexión plantar sin contacto con la superficie
-
A: Centroda de la articulación tibio-peroneo-astragalina
-
R: Peso del segmento anatómico del pie aplicado en su baricentro, el cual está ubicado aproximadamente a una fracción de 0,4415 (Leva, 1996) del punto proximal ubicado en la centroda de la articulación tibio-peroneo-astragalina sobre el eje que pasa por el antepié en el segundo artejo
-
P: Fuerza muscular del tríceps sural que se transmite a través del tendón de Aquiles y se aplica en la parte superior de la tuberosidad del calcáneo
-
Disposición de los elementos: P-A-R
-
Género de palanca: 1, inter-fija
-
Ventaja mecánica: No obtiene

-
Discusión: Aunque en la plantiflexión activa participan varios músculos a saber: tibial posterior, flexores largos de los dedos, peroneos laterales largo y corto, los cuales desempeñan el papel de sinergistas en el gesto, son los músculos del tríceps sural (gemelos y sóleo) los que asumen el rol agonista principal. Es determinante para la transmisión de la fuerza que genera dicho grupo muscular, la acción de cable del tendón de Aquiles, el cual con una sección transversal aproximada de 75 mm2 y una resistencia promedio a la rotura de 80 N/mm2, presenta una capacidad de carga de unos 600 kg (Schünke et al., 2011). Esto significa que al caer en plantiflexión sobre ambos pies, se exhibe una resistencia a la rotura que supera con creces el valor de una tonelada. No obstante, las sobrecargas crónicas propias de disciplinas como el salto de altura, pueden generar micro-traumatismos a repetición que disminuyen la circulación en estas zonas, con la consecuente disminución del aporte de oxígeno que conlleva a su degeneración y se vuelve frágil porque disminuye notoriamente su resistencia, ocasionando finalmente su rotura.
-
En el caso presentado en la figura 21(a), cada extremidad inferior debe soportar en condiciones normales la mitad del peso corporal con la aplicación de una fuerza muscular mucho menor del tríceps sural. Con todo, cuando el miembro inferior de posición realiza el apoyo monopodal durante la marcha y simultáneamente el contralateral está en la fase de balanceo, se puede soportar todo el peso corporal utilizando una fuerza muscular de menor valor que permite obtener ventaja mecánica.
-
En el pie se pueden utilizar palancas de los tres géneros. Hemos analizado una palanca de segundo género en el caso 21(a) y una de primer género en el caso 21(b). En el caso de una dorsiflexión activa del pie sin contacto con el piso, el apoyo está ubicado en la centroda de la articulación tibio-peroneo-astragalina, la resistencia es el peso del segmento anatómico del pie ubicado en su baricentro, descrito en el caso 21(b) y, la potencia es la fuerza muscular del tibial anterior aplicada en el primer cuneiforme y base dorsal del primer metatarsiano. Los músculos extensores largos de los dedos y peroneo anterior actúan como sinergistas. La disposición de los elementos es A-P-R constituyendo una palanca de tercer género o inter-potente, la cual no obtiene ventaja mecánica.
Bibliografía
-
Aguado Jódar, Xavier. Eficacia y técnica deportiva. Análisis del movimiento humano. 1ª ed. Barcelona: INDE Publicaciones. 1993.
-
Ahonem, Jamo; Lahtinen, Tina; Sandström, Marita; Pogliani, Giuliano y Wirhed, Rolf. Kinesiología y anatomía aplicada a la actividad física. 2ª ed. Barcelona: Paidotribo. 2001.
-
Arcila, Juan; Cardona, Donaldo y Giraldo, Juan. Abordaje físico-matemático del gesto articular. EFDeportes.com. Revista digital. Buenos Aires, Año 17, Nº 171. 2012. http://www.efdeportes.com/efd171/abordaje-fisico-matematico-del-gesto-articular.htm
-
Bäumler, Günter y Schneider, Klaus. Biomecánica deportiva. Fundamentos para el estudio y la práctica. Barcelona: Martínez Roca, S.A. 1989.
-
Bueche, Frederick J. Física general. 3ª ed. México: McGraw-Hill. 1991.
-
Calais-Germain, Blandine. Anatomía para el movimiento. Tomo I. Introducción al análisis de las técnicas corporales. Barcelona: La liebre de Marzo. 2010.
-
Donskoi, D. Biomecánica con fundamentos de la técnica deportiva. La Habana: Pueblo y Educación. 1982.
-
Drake, Richard L.; Vogl, Wayne and Mitchell; Gray, Adam W. Anatomía para estudiantes. Madrid: Elsevier España, S.A. 2007.
-
Enoka, Roger M. Neuromechanics of human movement. 3ª ed. Champaign: Human Kinetics. 2002.
-
Fucci, Sergio; Benigni, Mario y Fornasari, Vittorio. Biomecánica del aparato locomotor aplicada al acondicionamiento muscular. 3ª ed. Barcelona: Harcourt Brace. 1998.
-
Gowitzke, Barbara y Milner, Morris. El cuerpo y sus movimientos. Bases científicas. 3ª ed. Barcelona: Paidotribo. 1999.
-
Grosser, Manfred; Heike, Hermann; Tusker, Ferdinand y Zintl, Fritz. El movimiento deportivo. Bases anatómicas y biomecánicas. Barcelona: Martínez roca S. A. 1991.
-
Guillén del Castillo, Manuel y Linares Girela, Daniel. Bases biológicas y fisiológicas del movimiento humano. Madrid: Médica Panamericana S.A. 2002.
-
Gutiérrez Dávila, Marcos. Biomecánica deportiva. 1ª reimpresión. Madrid: Síntesis. 1999.
-
Hainaut, Karl. Introducción a la biomecánica. 1ª ed. Barcelona: JIMS.1976.
-
Herrera, Miguel Ángel. Biofísica, Geofísica, Astrofísica. Para qué sirve la Física. México: Ediciones Científicas Universitarias, Universidad Nacional Autónoma de México. 2001.
-
Hochmuth, Gerhard. Biomecánica de los movimientos deportivos. 1ª ed. Madrid: DONCEL, Instituto Nacional de Educación Física. 1973.
-
Leva, P. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. Journal of Biomechanics. 29,9 (1223-1230). 1996.
-
MacDonald, Simon y Burns, Desmond. Física. Wilmington, Delaware, E. U. A.: Addison-Wesley Iberoamericana, S. A.
-
Marion, Jerry B. and Hornyak, William, F. Physics for science and engineering, Part 1. University of Maryland. New York: Saunders College Publishing. 1982.
-
Miralles Marrero, Rodrigo C. Biomecánica clínica del aparato locomotor. 1ª ed. 2ª reimpresión. Barcelona: Masson, S.A. 2002.
-
Molano Tobar, Nancy Janeth. Examen muscular y valoración de la movilidad articular. Manual. 21ed. Armenia: Kinesis. 2008.
-
Piña Barba, María Cristina. La física en medicina. 3ª ed. México: La Ciencia para todos, 37. 2002.
-
Rasch, Philip y Burke, Roger. Kinesiología y anatomía aplicada. 6ª ed. Buenos Aires: El Ateneo. 1986.
-
Schünke, Michael; Schulte, Erik y Schumacher, Udo. Prometheus. Texto y atlas de anatomía. Tomo I. 2ª ed. Madrid: Médica Panamericana, S.A. 2011.
-
Tuszynski, Jack A. and Dixon, John M. Biomedical applications of introductory physics. New York: John Wiley & Sons. Inc. 2002.
-
Vander, F. Analyse des mouvements du corps humain. Desoer, Liège. 1961.
-
Vogel, Steven. Ancas y palancas, mecánica natural y mecánica humana. 1ª ed. Barcelona: Metatemas. 2000.
-
Vogel, Steven. Comparative biomechanics. Life’s physical world. Princeton University Press: 2003.
-
Zatsiorski, V y Donskoi, D. Biomecánica de los ejercicios físicos. 1ª reimpresión. La Habana: Pueblo y Educación. 1990.
Otros artículos sobre Biomecánica
| |

Búsqueda personalizada
|
|---|---|
|
EFDeportes.com, Revista Digital · Año 18 · N° 182 | Buenos Aires,
Julio de 2013 |
|